mechanisim => mechanism
http://docs.openstack.org/developer/swift/cors.html
overridde => override
http://docs.openstack.org/developer/swift/deployment_guide.html
extentsions => extensions
http://docs.openstack.org/developer/swift/development_ondisk_backends.html
reuqest => request
http://docs.openstack.org/developer/swift/logs.html
suport => support
http://docs.openstack.org/developer/swift/overview_architecture.html
mininum => minimum
http://docs.openstack.org/developer/swift/overview_erasure_code.html
$ git diff | diffstat
cors.rst | 2 +-
deployment_guide.rst | 2 +-
development_ondisk_backends.rst | 2 +-
logs.rst | 2 +-
overview_architecture.rst | 2 +-
overview_erasure_code.rst | 2 +-
6 files changed, 6 insertions(+), 6 deletions(-)
Change-Id: I8e095f4c216b2cfae48dff1e17d387048349f73c
Closes-Bug: #1477877
32 KiB
Executable File
Erasure Code Support
Beta: Not production ready
The erasure code support in Swift is considered "beta" at this point. Most major functionality is included, but it has not been tested or validated at large scale. This feature relies on ssync for durability. Deployers are urged to do extensive testing and not deploy production data using an erasure code storage policy.
If any bugs are found during testing, please report them to https://bugs.launchpad.net/swift
History and Theory of Operation
There's a lot of good material out there on Erasure Code (EC) theory, this short introduction is just meant to provide some basic context to help the reader better understand the implementation in Swift.
Erasure Coding for storage applications grew out of Coding Theory as far back as the 1960s with the Reed-Solomon codes. These codes have been used for years in applications ranging from CDs to DVDs to general communications and, yes, even in the space program starting with Voyager! The basic idea is that some amount of data is broken up into smaller pieces called fragments and coded in such a way that it can be transmitted with the ability to tolerate the loss of some number of the coded fragments. That's where the word "erasure" comes in, if you transmit 14 fragments and only 13 are received then one of them is said to be "erased". The word "erasure" provides an important distinction with EC; it isn't about detecting errors, it's about dealing with failures. Another important element of EC is that the number of erasures that can be tolerated can be adjusted to meet the needs of the application.
At a high level EC works by using a specific scheme to break up a single data buffer into several smaller data buffers then, depending on the scheme, performing some encoding operation on that data in order to generate additional information. So you end up with more data than you started with and that extra data is often called "parity". Note that there are many, many different encoding techniques that vary both in how they organize and manipulate the data as well by what means they use to calculate parity. For example, one scheme might rely on Galois Field Arithmetic <http://www.ssrc.ucsc.edu/Papers/plank- fast13.pdf> while others may work with only XOR. The number of variations and details about their differences are well beyond the scope of this introduction, but we will talk more about a few of them when we get into the implementation of EC in Swift.
Overview of EC Support in Swift
First and foremost, from an application perspective EC support is totally transparent. There are no EC related external API; a container is simply created using a Storage Policy defined to use EC and then interaction with the cluster is the same as any other durability policy.
EC is implemented in Swift as a Storage Policy, see overview_policies for
complete details on Storage Policies. Because support is implemented as
a Storage Policy, all of the storage devices associated with your
cluster's EC capability can be isolated. It is entirely possible to
share devices between storage policies, but for EC it may make more
sense to not only use separate devices but possibly even entire nodes
dedicated for EC.
Which direction one chooses depends on why the EC policy is being deployed. If, for example, there is a production replication policy in place already and the goal is to add a cold storage tier such that the existing nodes performing replication are impacted as little as possible, adding a new set of nodes dedicated to EC might make the most sense but also incurs the most cost. On the other hand, if EC is being added as a capability to provide additional durability for a specific set of applications and the existing infrastructure is well suited for EC (sufficient number of nodes, zones for the EC scheme that is chosen) then leveraging the existing infrastructure such that the EC ring shares nodes with the replication ring makes the most sense. These are some of the main considerations:
- Layout of existing infrastructure.
- Cost of adding dedicated EC nodes (or just dedicated EC devices).
- Intended usage model(s).
The Swift code base does not include any of the algorithms necessary to perform the actual encoding and decoding of data; that is left to external libraries. The Storage Policies architecture is leveraged to enable EC on a per container basis -- the object rings are still used to determine the placement of EC data fragments. Although there are several code paths that are unique to an operation associated with an EC policy, an external dependency to an Erasure Code library is what Swift counts on to perform the low level EC functions. The use of an external library allows for maximum flexibility as there are a significant number of options out there, each with its owns pros and cons that can vary greatly from one use case to another.
PyECLib: External Erasure Code Library
PyECLib is a Python Erasure Coding Library originally designed and written as part of the effort to add EC support to the Swift project, however it is an independent project. The library provides a well-defined and simple Python interface and internally implements a plug-in architecture allowing it to take advantage of many well-known C libraries such as:
- Jerasure and GFComplete at http://jerasure.org.
- Intel(R) ISA-L at http://01.org/intel%C2%AE-storage-acceleration-library-open-source-version.
- Or write your own!
PyECLib uses a C based library called liberasurecode to implement the plug in infrastructure; liberasure code is available at:
- liberasurecode: https://bitbucket.org/tsg-/liberasurecode
PyECLib itself therefore allows for not only choice but further extensibility as well. PyECLib also comes with a handy utility to help determine the best algorithm to use based on the equipment that will be used (processors and server configurations may vary in performance per algorithm). More on this will be covered in the configuration section. PyECLib is included as a Swift requirement.
For complete details see PyECLib
Storing and Retrieving Objects
We will discuss the details of how PUT and GET work in the "Under the Hood" section later on. The key point here is that all of the erasure code work goes on behind the scenes; this summary is a high level information overview only.
The PUT flow looks like this:
- The proxy server streams in an object and buffers up "a segment" of data (size is configurable).
- The proxy server calls on PyECLib to encode the data into smaller fragments.
- The proxy streams the encoded fragments out to the storage nodes based on ring locations.
- Repeat until the client is done sending data.
- The client is notified of completion when a quorum is met.
The GET flow looks like this:
- The proxy server makes simultaneous requests to participating nodes.
- As soon as the proxy has the fragments it needs, it calls on PyECLib to decode the data.
- The proxy streams the decoded data it has back to the client.
- Repeat until the proxy is done sending data back to the client.
It may sound like, from this high level overview, that using EC is going to cause an explosion in the number of actual files stored in each node's local file system. Although it is true that more files will be stored (because an object is broken into pieces), the implementation works to minimize this where possible, more details are available in the Under the Hood section.
Handoff Nodes
In EC policies, similarly to replication, handoff nodes are a set of storage nodes used to augment the list of primary nodes responsible for storing an erasure coded object. These handoff nodes are used in the event that one or more of the primaries are unavailable. Handoff nodes are still selected with an attempt to achieve maximum separation of the data being placed.
Reconstruction
For an EC policy, reconstruction is analogous to the process of replication for a replication type policy -- essentially "the reconstructor" replaces "the replicator" for EC policy types. The basic framework of reconstruction is very similar to that of replication with a few notable exceptions:
- Because EC does not actually replicate partitions, it needs to operate at a finer granularity than what is provided with rsync, therefore EC leverages much of ssync behind the scenes (you do not need to manually configure ssync).
- Once a pair of nodes has determined the need to replace a missing object fragment, instead of pushing over a copy like replication would do, the reconstructor has to read in enough surviving fragments from other nodes and perform a local reconstruction before it has the correct data to push to the other node.
- A reconstructor does not talk to all other reconstructors in the set of nodes responsible for an EC partition, this would be far too chatty, instead each reconstructor is responsible for sync'ing with the partition's closest two neighbors (closest meaning left and right on the ring).
Note
EC work (encode and decode) takes place both on the proxy nodes, for PUT/GET operations, as well as on the storage nodes for reconstruction. As with replication, reconstruction can be the result of rebalancing, bit-rot, drive failure or reverting data from a hand-off node back to its primary.
Performance Considerations
Efforts are underway to characterize performance of various Erasure Code schemes. One of the main goals of the beta release is to perform this characterization and encourage others to do so and provide meaningful feedback to the development community. There are many factors that will affect performance of EC so it is vital that we have multiple characterization activities happening.
In general, EC has different performance characteristics than replicated data. EC requires substantially more CPU to read and write data, and is more suited for larger objects that are not frequently accessed (eg backups).
Using an Erasure Code Policy
To use an EC policy, the administrator simply needs to define an EC policy in swift.conf and create/configure the associated object ring. An example of how an EC policy can be setup is shown below:
[storage-policy:2]
name = ec104
policy_type = erasure_coding
ec_type = jerasure_rs_vand
ec_num_data_fragments = 10
ec_num_parity_fragments = 4
ec_object_segment_size = 1048576Let's take a closer look at each configuration parameter:
name: This is a standard storage policy parameter. Seeoverview_policiesfor details.policy_type: Set this toerasure_codingto indicate that this is an EC policy.ec_type: Set this value according to the available options in the selected PyECLib back-end. This specifies the EC scheme that is to be used. For example the option shown here selects Vandermonde Reed-Solomon encoding while an option offlat_xor_hd_3would select Flat-XOR based HD combination codes. See the PyECLib page for full details.ec_num_data_fragments: The total number of fragments that will be comprised of data.ec_num_parity_fragments: The total number of fragments that will be comprised of parity.ec_object_segment_size: The amount of data that will be buffered up before feeding a segment into the encoder/decoder. The default value is 1048576.
When PyECLib encodes an object, it will break it into N fragments. However, what is important during configuration, is how many of those are data and how many are parity. So in the example above, PyECLib will actually break an object in 14 different fragments, 10 of them will be made up of actual object data and 4 of them will be made of parity data (calculations depending on ec_type).
When deciding which devices to use in the EC policy's object ring, be sure to carefully consider the performance impacts. Running some performance benchmarking in a test environment for your configuration is highly recommended before deployment. Once you have configured your EC policy in swift.conf and created your object ring, your application is ready to start using EC simply by creating a container with the specified policy name and interacting as usual.
Note
It's important to note that once you have deployed a policy and have created objects with that policy, these configurations options cannot be changed. In case a change in the configuration is desired, you must create a new policy and migrate the data to a new container.
Migrating Between Policies
A common usage of EC is to migrate less commonly accessed data from a more expensive but lower latency policy such as replication. When an application determines that it wants to move data from a replication policy to an EC policy, it simply needs to move the data from the replicated container to an EC container that was created with the target durability policy.
Region Support
For at least the initial version of EC, it is not recommended that an EC scheme span beyond a single region, neither performance nor functional validation has be been done in such a configuration.
Under the Hood
Now that we've explained a little about EC support in Swift and how to configure/use it, let's explore how EC fits in at the nuts-n-bolts level.
Terminology
The term 'fragment' has been used already to describe the output of the EC process (a series of fragments) however we need to define some other key terms here before going any deeper. Without paying special attention to using the correct terms consistently, it is very easy to get confused in a hurry!
- chunk: HTTP chunks received over wire (term not used to describe any EC specific operation).
- segment: Not to be confused with SLO/DLO use of the word, in EC we call a segment a series of consecutive HTTP chunks buffered up before performing an EC operation.
- fragment: Data and parity 'fragments' are generated when erasure coding transformation is applied to a segment.
- EC archive: A concatenation of EC fragments; to a storage node this looks like an object.
- ec_ndata: Number of EC data fragments.
- ec_nparity: Number of EC parity fragments.
Middleware
Middleware remains unchanged. For most middleware (e.g., SLO/DLO) the fact that the proxy is fragmenting incoming objects is transparent. For list endpoints, however, it is a bit different. A caller of list endpoints will get back the locations of all of the fragments. The caller will be unable to re-assemble the original object with this information, however the node locations may still prove to be useful information for some applications.
On Disk Storage
EC archives are stored on disk in their respective objects-N
directory based on their policy index. See overview_policies for details
on per policy directory information.
The actual names on disk of EC archives also have one additional piece of data encoded in the filename, the fragment archive index.
Each storage policy now must include a transformation function that
diskfile will use to build the filename to store on disk. The functions
are implemented in the diskfile module as policy specific sub classes
DiskFileManager.
This is required for a few reasons. For one, it allows us to store fragment archives of different indexes on the same storage node which is not typical however it is possible in many circumstances. Without unique filenames for the different EC archive files in a set, we would be at risk of overwriting one archive of index n with another of index m in some scenarios.
The transformation function for the replication policy is simply a NOP. For reconstruction, the index is appended to the filename just before the .data extension. An example filename for a fragment archive storing the 5th fragment would like this this:
1418673556.92690#5.dataAn additional file is also included for Erasure Code policies called
the .durable file. Its meaning will be covered in detail
later, however, its on-disk format does not require the name
transformation function that was just covered. The .durable for the
example above would simply look like this:
1418673556.92690.durableAnd it would be found alongside every fragment specific .data file following a 100% successful PUT operation.
Proxy Server
High Level
The Proxy Server handles Erasure Coding in a different manner than replication, therefore there are several code paths unique to EC policies either though sub classing or simple conditionals. Taking a closer look at the PUT and the GET paths will help make this clearer. But first, a high level overview of how an object flows through the system:
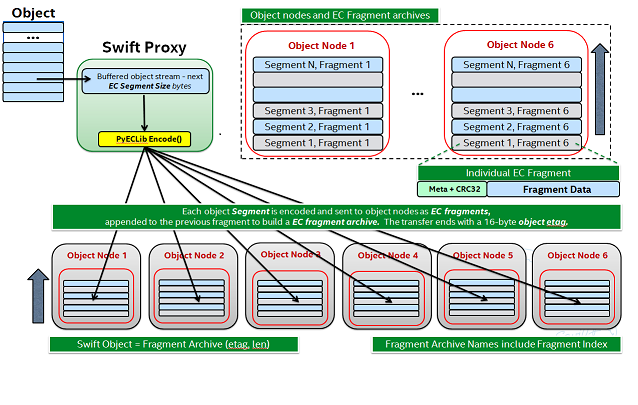
Note how:
- Incoming objects are buffered into segments at the proxy.
- Segments are erasure coded into fragments at the proxy.
- The proxy stripes fragments across participating nodes such that the on-disk stored files that we call a fragment archive is appended with each new fragment.
This scheme makes it possible to minimize the number of on-disk files given our segmenting and fragmenting.
Multi_Phase Conversation
Multi-part MIME document support is used to allow the proxy to engage in a handshake conversation with the storage node for processing PUT requests. This is required for a few different reasons.
- From the perspective of the storage node, a fragment archive is really just another object, we need a mechanism to send down the original object etag after all fragment archives have landed.
- Without introducing strong consistency semantics, the proxy needs a mechanism to know when a quorum of fragment archives have actually made it to disk before it can inform the client of a successful PUT.
MIME supports a conversation between the proxy and the storage nodes for every PUT. This provides us with the ability to handle a PUT in one connection and assure that we have the essence of a 2 phase commit, basically having the proxy communicate back to the storage nodes once it has confirmation that all fragment archives in the set have been committed. Note that we still require a quorum of data elements of the conversation to complete before signaling status to the client but we can relax that requirement for the commit phase such that only 2 confirmations to that phase of the conversation are required for success as the reconstructor will assure propagation of markers that indicate data durability.
This provides the storage node with a cheap indicator of the last
known durable set of fragment archives for a given object on a
successful durable PUT, this is known as the .durable file.
The presence of a .durable file means, to the object
server, there is a set of ts.data files that are
durable at timestamp ts. Note that the completion of the commit
phase of the conversation is also a signal for the object server to go
ahead and immediately delete older timestamp files for this object. This
is critical as we do not want to delete the older object until the
storage node has confirmation from the proxy, via the multi-phase
conversation, that the other nodes have landed enough for a quorum.
The basic flow looks like this:
- The Proxy Server erasure codes and streams the object fragments (ec_ndata + ec_nparity) to the storage nodes.
- The storage nodes store objects as EC archives and upon finishing object data/metadata write, send a 1st-phase response to proxy.
- Upon quorum of storage nodes responses, the proxy initiates 2nd-phase by sending commit confirmations to object servers.
- Upon receipt of commit message, object servers store a 0-byte data file as <timestamp>.durable indicating successful PUT, and send a final response to the proxy server.
- The proxy waits for a minimal number of two object servers to respond with a success (2xx) status before responding to the client with a successful status. In this particular case it was decided that two responses was the minimum amount to know that the file would be propagated in case of failure from other others and because a greater number would potentially mean more latency, which should be avoided if possible.
Here is a high level example of what the conversation looks like:
proxy: PUT /p/a/c/o
Transfer-Encoding': 'chunked'
Expect': '100-continue'
X-Backend-Obj-Multiphase-Commit: yes
obj: 100 Continue
X-Obj-Multiphase-Commit: yes
proxy: --MIMEboundary
X-Document: object body
<obj_data>
--MIMEboundary
X-Document: object metadata
Content-MD5: <footer_meta_cksum>
<footer_meta>
--MIMEboundary
<object server writes data, metadata>
obj: 100 Continue
<quorum>
proxy: X-Document: put commit
commit_confirmation
--MIMEboundary--
<object server writes ts.durable state>
obj: 20x
<proxy waits to receive >=2 2xx responses>
proxy: 2xx -> clientA few key points on the .durable file:
- The .durable file means "the matching .data file for this has sufficient fragment archives somewhere, committed, to reconstruct the object".
- The Proxy Server will never have knowledge, either on GET or HEAD, of the existence of a .data file on an object server if it does not have a matching .durable file.
- The object server will never return a .data that does not have a matching .durable.
- When a proxy does a GET, it will only receive fragment archives that have enough present somewhere to be reconstructed.
Partial PUT Failures
A partial PUT failure has a few different modes. In one scenario the Proxy Server is alive through the entire PUT conversation. This is a very straightforward case. The client will receive a good response if and only if a quorum of fragment archives were successfully landed on their storage nodes. In this case the Reconstructor will discover the missing fragment archives, perform a reconstruction and deliver fragment archives and their matching .durable files to the nodes.
The more interesting case is what happens if the proxy dies in the middle of a conversation. If it turns out that a quorum had been met and the commit phase of the conversation finished, its as simple as the previous case in that the reconstructor will repair things. However, if the commit didn't get a change to happen then some number of the storage nodes have .data files on them (fragment archives) but none of them knows whether there are enough elsewhere for the entire object to be reconstructed. In this case the client will not have received a 2xx response so there is no issue there, however, it is left to the storage nodes to clean up the stale fragment archives. Work is ongoing in this area to enable the proxy to play a role in reviving these fragment archives, however, for the current release, a proxy failure after the start of a conversation but before the commit message will simply result in a PUT failure.
GET
The GET for EC is different enough from replication that subclassing the BaseObjectController to the ECObjectController enables an efficient way to implement the high level steps described earlier:
- The proxy server makes simultaneous requests to participating nodes.
- As soon as the proxy has the fragments it needs, it calls on PyECLib to decode the data.
- The proxy streams the decoded data it has back to the client.
- Repeat until the proxy is done sending data back to the client.
The GET path will attempt to contact all nodes participating in the EC scheme, if not enough primaries respond then handoffs will be contacted just as with replication. Etag and content length headers are updated for the client response following reconstruction as the individual fragment archives metadata is valid only for that fragment archive.
Object Server
The Object Server, like the Proxy Server, supports MIME conversations as described in the proxy section earlier. This includes processing of the commit message and decoding various sections of the MIME document to extract the footer which includes things like the entire object etag.
DiskFile
Erasure code uses subclassed ECDiskFile,
ECDiskFileWriter and ECDiskFileManager to
impement EC specific handling of on disk files. This includes things
like file name manipulation to include the fragment index in the
filename, determination of valid .data files based on .durable presence,
construction of EC specific hashes.pkl file to include fragment index
information, etc., etc.
Metadata
There are few different categories of metadata that are associated with EC:
System Metadata: EC has a set of object level system metadata that it attaches to each of the EC archives. The metadata is for internal use only:
X-Object-Sysmeta-EC-Etag: The Etag of the original object.X-Object-Sysmeta-EC-Content-Length: The content length of the original object.X-Object-Sysmeta-EC-Frag-Index: The fragment index for the object.X-Object-Sysmeta-EC-Scheme: Description of the EC policy used to encode the object.X-Object-Sysmeta-EC-Segment-Size: The segment size used for the object.
User Metadata: User metadata is unaffected by EC, however, a full copy of the user metadata is stored with every EC archive. This is required as the reconstructor needs this information and each reconstructor only communicates with its closest neighbors on the ring.
PyECLib Metadata: PyECLib stores a small amount of metadata on a per fragment basis. This metadata is not documented here as it is opaque to Swift.
Database Updates
As account and container rings are not associated with a Storage Policy, there is no change to how these database updates occur when using an EC policy.
The Reconstructor
The Reconstructor performs analogous functions to the replicator:
- Recovery from disk drive failure.
- Moving data around because of a rebalance.
- Reverting data back to a primary from a handoff.
- Recovering fragment archives from bit rot discovered by the auditor.
However, under the hood it operates quite differently. The following are some of the key elements in understanding how the reconstructor operates.
Unlike the replicator, the work that the reconstructor does is not always as easy to break down into the 2 basic tasks of synchronize or revert (move data from handoff back to primary) because of the fact that one storage node can house fragment archives of various indexes and each index really /"belongs/" to a different node. So, whereas when the replicator is reverting data from a handoff it has just one node to send its data to, the reconstructor can have several. Additionally, its not always the case that the processing of a particular suffix directory means one or the other for the entire directory (as it does for replication). The scenarios that create these mixed situations can be pretty complex so we will just focus on what the reconstructor does here and not a detailed explanation of why.
Job Construction and Processing
Because of the nature of the work it has to do as described above, the reconstructor builds jobs for a single job processor. The job itself contains all of the information needed for the processor to execute the job which may be a synchronization or a data reversion and there may be a mix of jobs that perform both of these operations on the same suffix directory.
Jobs are constructed on a per partition basis and then per fragment index basis. That is, there will be one job for every fragment index in a partition. Performing this construction "up front" like this helps minimize the interaction between nodes collecting hashes.pkl information.
Once a set of jobs for a partition has been constructed, those jobs are sent off to threads for execution. The single job processor then performs the necessary actions working closely with ssync to carry out its instructions. For data reversion, the actual objects themselves are cleaned up via the ssync module and once that partition's set of jobs is complete, the reconstructor will attempt to remove the relevant directory structures.
The scenarios that job construction has to take into account include:
- A partition directory with all fragment indexes matching the local node index. This is the case where everything is where it belongs and we just need to compare hashes and sync if needed, here we sync with our partners.
- A partition directory with one local fragment index and mix of others. Here we need to sync with our partners where fragment indexes matches the local_id, all others are sync'd with their home nodes and then deleted.
- A partition directory with no local fragment index and just one or more of others. Here we sync with just the home nodes for the fragment indexes that we have and then all the local archives are deleted. This is the basic handoff reversion case.
Note
A "home node" is the node where the fragment index encoded in the fragment archive's filename matches the node index of a node in the primary partition list.
Node Communication
The replicators talk to all nodes who have a copy of their object, typically just 2 other nodes. For EC, having each reconstructor node talk to all nodes would incur a large amount of overhead as there will typically be a much larger number of nodes participating in the EC scheme. Therefore, the reconstructor is built to talk to its adjacent nodes on the ring only. These nodes are typically referred to as partners.
Reconstruction
Reconstruction can be thought of sort of like replication but with an extra step in the middle. The reconstructor is hard-wired to use ssync to determine what is missing and desired by the other side. However, before an object is sent over the wire it needs to be reconstructed from the remaining fragments as the local fragment is just that - a different fragment index than what the other end is asking for.
Thus, there are hooks in ssync for EC based policies. One case would be for basic reconstruction which, at a high level, looks like this:
- Determine which nodes need to be contacted to collect other EC archives needed to perform reconstruction.
- Update the etag and fragment index metadata elements of the newly constructed fragment archive.
- Establish a connection to the target nodes and give ssync a DiskFileLike class that it can stream data from.
The reader in this class gathers fragments from the nodes and uses PyECLib to reconstruct each segment before yielding data back to ssync. Essentially what this means is that data is buffered, in memory, on a per segment basis at the node performing reconstruction and each segment is dynamically reconstructed and delivered to ssync_sender where the send_put() method will ship them on over. The sender is then responsible for deleting the objects as they are sent in the case of data reversion.
The Auditor
Because the auditor already operates on a per storage policy basis, there are no specific auditor changes associated with EC. Each EC archive looks like, and is treated like, a regular object from the perspective of the auditor. Therefore, if the auditor finds bit-rot in an EC archive, it simply quarantines it and the reconstructor will take care of the rest just as the replicator does for replication policies.